Availability: In stock













- Package: TQFP
- is_customized: Yes
- Model Number: Drive Board
- Supply Voltage: 5V
- Application: Computer
- Type: Drive IC
- Brand Name: keyestudio
- Origin: Mainland China
- Condition: New
- Operating Temperature: -10~40
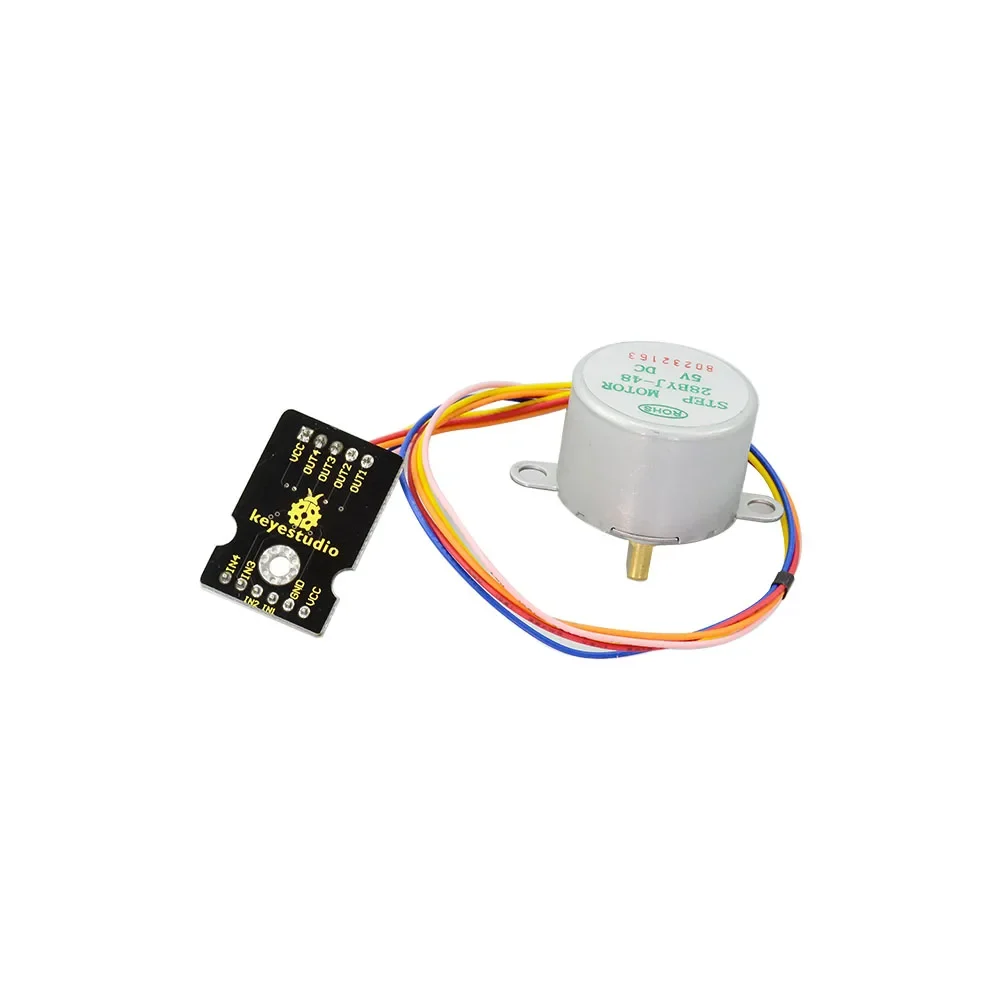
- Stepping Angle: 5.625 x 1/64
- Reduction Ratio: 1/64
- Type: KS0327
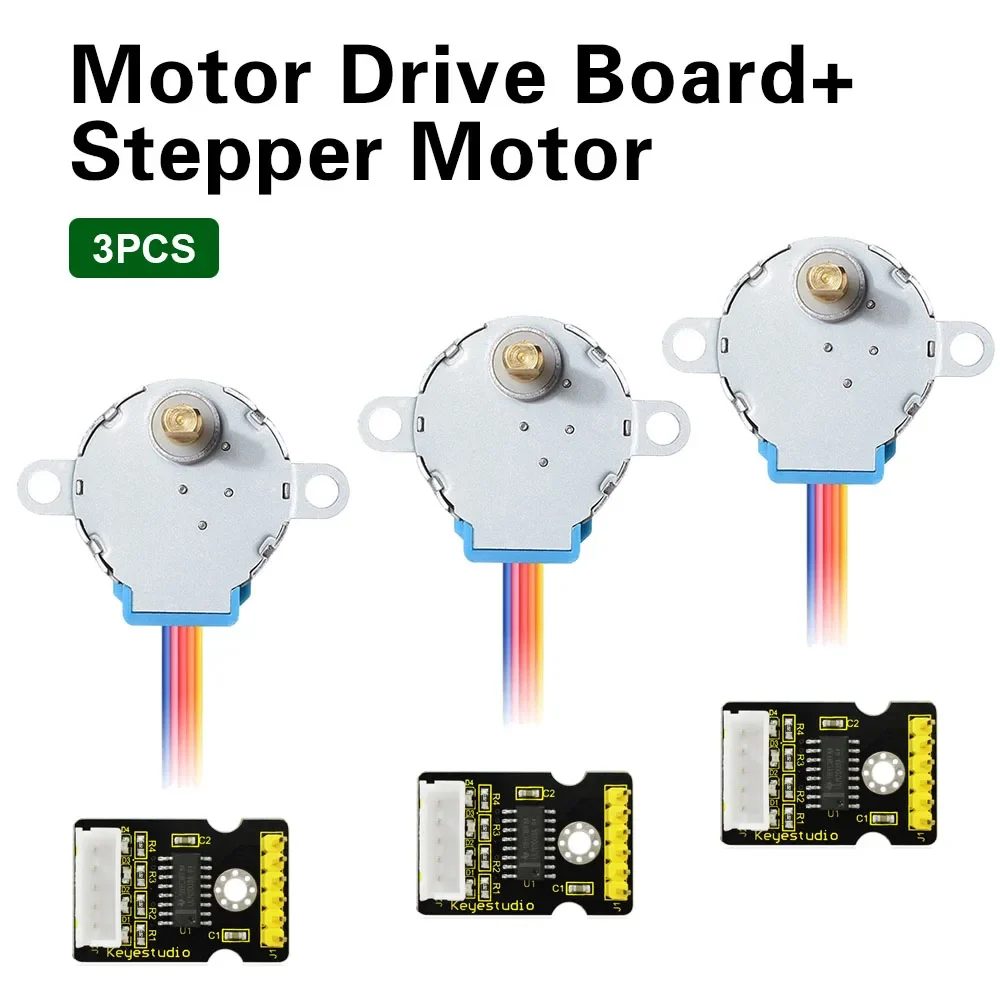
A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical movements. The shaft or spindle of a stepper motor rotates in discrete step increments when electrical command pulses are applied to it in the proper sequence. The motors rotation has several direct relationships to these applied input pulses. The sequence of the applied pulses is directly related to the direction of motor shafts rotation. The speed of the motor shafts rotation is directly related to the frequency of the input pulses and the length of rotation is directly related to the number of input pulses applied.One of the most significant advantages of a stepper motor is its ability to be accurately controlled in an open loop system. Open loop control means no feedback information about position is needed. This type of control eliminates the need for expensive sensing and feedback devices such as optical encoders. Your position is known simply by keeping track of the input step pulses.
This kit mainly consists of three deceleration stepper motors (28BYJ-48) and three stepper motor(5-wire 4-phase) driver boards (ULN2003).Stepper motor driver board mainly adopts ULN2003 chip. It is a seven-fold Darlington array. This circuit is the inverted output type, that is, its output terminal can be turned on to work only by inputting a low-level voltage. Onboard comes with 4 LEDs, so in this way you can know the state of input control pulse.
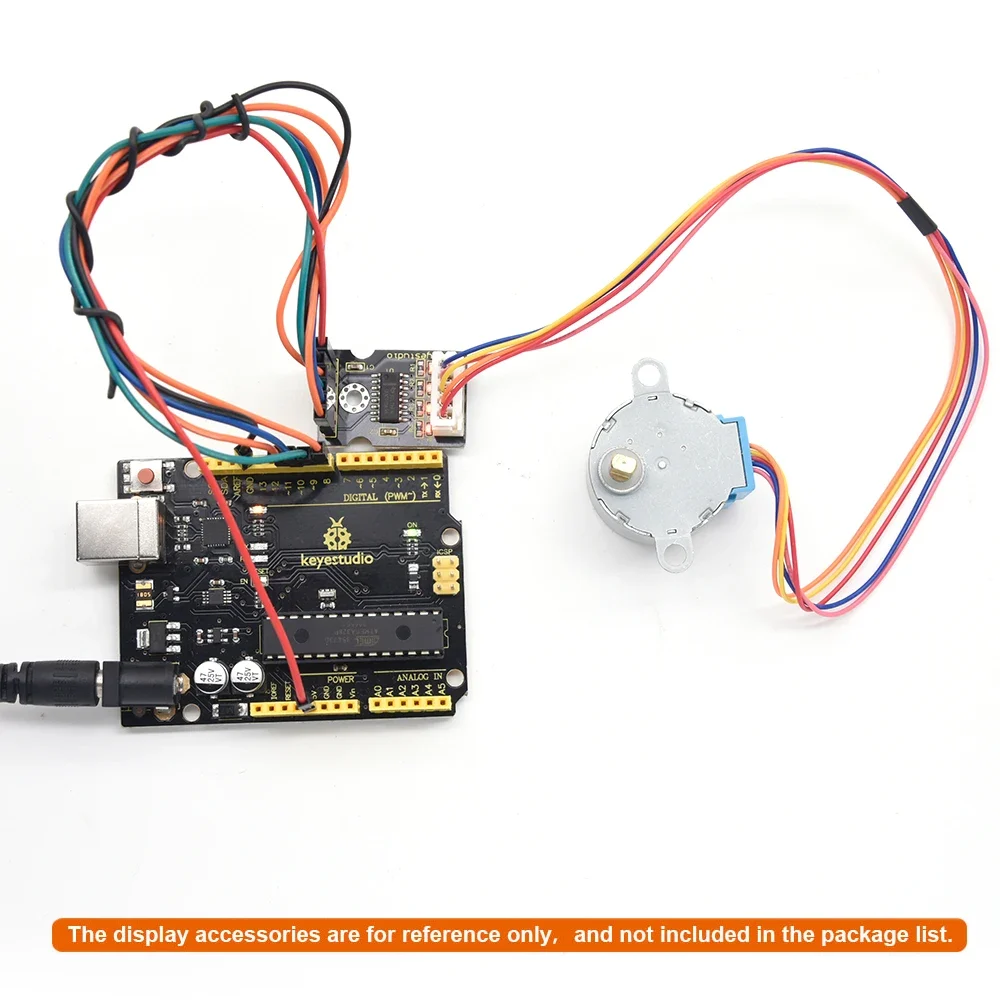
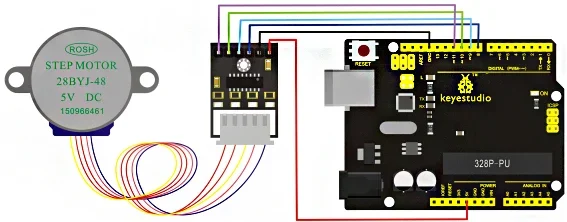
In the experiment, we connect the stepper motor to its driver board, and then connect the drive board to microcontroller. The interface is anti-reversed type, so do not worry about the wrong connection.